
Hybride Montagesysteme in der FahrzeugmontageWirtschaftlich partizipative Gestaltung der Mensch-Roboter-Kooperation
Lesedauer: 6 Minuten
|

Die Mensch-Roboter-Kooperation als Prozesstechnologie ist bereits seit Jahren Betrachtungsgegenstand von Wissenschaft und Wirtschaft. Gegenwärtig existieren mehrere, auch technologisch verfügbare Lösungsansätze zur Serienumsetzung. Der Einsatz dieser hybriden Systeme in der Montageumgebung birgt großes Verbesserungspotenzial hinsichtlich Kosten, Qualität sowie Ergonomie und Effizienz.
Die Globalisierung setzt deutsche Unternehmen des produzierenden Gewerbes zunehmend unter Druck [1]. Durch immer stärker individualisierte Produkte steigt die damit verbundene Anzahl an Produktvarianten [2]. Verschärft wird diese Drucksituation durch kürzer werdende Produktlebenszyklen und steigende Qualitätsanforderungen bei möglichst geringen Kosten [2]. Viele der am Standort Deutschland produzierten, komplexen Stückgüter werden daher überwiegend in Kleinserie durch manuelle Montage hergestellt, um die Flexibilität in den Prozessen zu gewährleisten [3, 4].
Einen elementaren Bestandteil neuer Produktionskonzepte in der Montage bildet die Hinzunahme einer Automatisierungskomponente. Bei weiterhin anhaltender Flexibilität sind, trotz hoher Lohnkosten und weltweit höchster Sicherheits- und Arbeitsschutzstandards, Kosten- und Effizienzvorteile zu erwarten [3]. Ein hybrides Montagesystem besitzt im Gegensatz zu einer vollautomatisierten Anlage ein höheres Potenzial, um flexible und profitable Produktionssysteme zu gewährleisten [3].
Durch das Zusammenführen der Stärken von Robotertechnik, wie Präzision und hoher Handhabungslasten, mit den motorischen und sensorischen Fähigkeiten des Menschen können Zielkriterien wie Produktivität, Qualität sowie Ergonomie und Wirtschaftlichkeit positiv beeinflusst werden [2].
Produzierende Unternehmen stehen daher vor der Herausforderung, die fähigkeitsorientierte Aufteilung der Arbeitsinhalte zwischen Mensch und Roboter zu bestimmen sowie die richtige Implementierungsstrategie zu wählen. Um je nach Produkt und Betriebstyp eine individuell ausgerichtete Lösung für ein hybrides Montagesystem zu planen, sind daher partizipative Ansätze erforderlich [2].
Hybride Montagesysteme in der Fahrzeugmontage
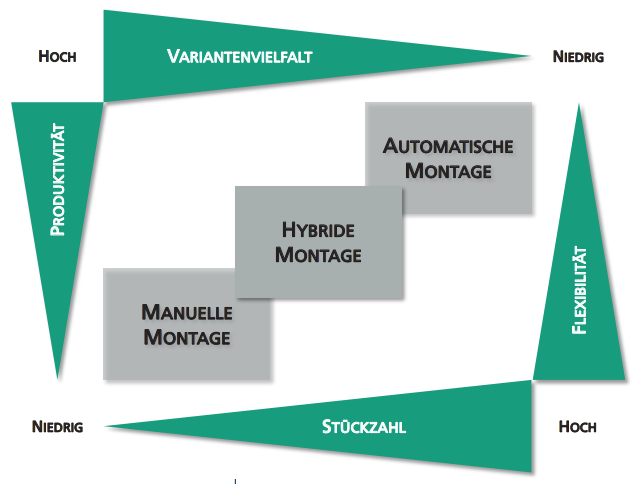
Hybride Montagesysteme kombinieren Hand- und Maschinenarbeitsplätze und eignen sich besonders für eine kostenoptimale Automatisierung komplexer Montagesysteme, die eine manuelle Mitarbeit zwingend erfordern [3]. In Bild 1 ist entsprechend dargestellt, bei welchen Anforderungen an Produktivität, Variantenvielfalt sowie Stückzahl und Flexibilität ein hybrides Montagesystem zweckmäßig ist.
Beinhaltet ein hybrides Montagesystem zum Austausch von Informationen und Handlungen zwischen Mensch und Automatisierungsmittel einen Industrieroboter zur Ausführung einer Aufgabe, so bildet dieses System eine sogenannte Mensch-Roboter-Kooperation [5]. Im Sinne des Kooperationsgedankens wirken Mensch und Roboter trotz deren grundlegend unterschiedlichen motorischen Leistungsfähigkeit, gemeinsam als Partner in einem Prozess. In diesem Kontext kommen kollaborierende Roboter zum Einsatz, die für das Zusammenwirken von Mensch und Roboter ohne trennende Schutzeinrichtung konstruiert sind [5].
Bei der Fahrzeugmontage sind die Arbeitsplätze klassisch in Reihe angeordnet und ermöglichen durch einen kontinuierlichen Verlauf eine Taktung des Montageablaufs [4]. In diesem Bereich durchläuft das zu produzierende Fahrzeug zahlreiche Arbeitsstationen, an denen die jeweils kundenindividuelle Ausstattung montiert wird. Diese Prozesse sind aufgrund motorischer Anforderungen und steigender Variantenvielfalt durch einen hohen Anteil manueller Fertigung von bis zu 95 % geprägt [3, 6]. Durch die fähigkeitsorientierte Prozessgestaltung einer Mensch-Roboter-Kooperation, bei der die Synergien von Mensch und Roboter genutzt werden, ergeben sich für Unternehmen Verbesserungen hinsichtlich Produktivität, Ergonomie, Qualität sowie der Arbeitssicherheit [6, 7].
Entscheidend für die erfolgreiche Umsetzung einer Mensch-Roboter-Kooperation ist die Beachtung der Sicherheits- und Arbeitsschutzstandards. Bei der Integration von Maschinen im europäischen Wirtschaftsraum regelt die Maschinenrichtlinie diesbezüglich ein einheitliches Niveau zur Unfallverhütung [8]. Die für den Serienbetrieb notwendige CE-Konformitätserklärung bestätigt vor der Integration einer Anlage in die betriebliche Praxis die Einhaltung aller geltenden Richtlinien und Normen aus dieser Maschinenrichtlinie. Die normative Grundlage für die sichere Gestaltung von Anwendungen mit Robotern bildet dabei die Normenreihe „Sicherheit von Maschinen“ [9], welche unter anderem den Prozess der Risikoeinschätzung und Risikominderung beschreibt. Eine daraus resultierende Risikobeurteilung ist zwingend Grundlage, um eine CE-Konformität für den Serienbetrieb zu erlangen.
Die DIN EN ISO 10218 Teil 1 und 2 sowie die DIN EN ISO 13849 Teil 1 und 2 stehen im direkten Bezug zur Mensch-Roboter-Kooperation und geben sowohl zentrale, als auch fachliche Sicherheitsanforderungen vor [10]. Daraus resultieren unter anderem die vier grundsätzlichen Sicherheitsansätze kollaborierender Robotersysteme [10]: I. sicherheitsbewertete überwachte Halt; II. Handführung; III. Geschwindigkeits- und Abstandsüberwachung; IV. Leistungs- und Kraftbegrenzung.

In der Leistungs- und Kraftbegrenzung (Kategorie IV) können gegenwärtig Leichtbauroboter ohne trennende Schutzeinrichtung mit dem Werker in einem überschneidenden Arbeitsraum tätig sein, wenn eine inhärent sichere Konstruktion gewährleistet ist [10]. Im Gegensatz zu einem kollaborierenden Betrieb mit einer Arbeitsraumüberwachung (Kategorie III), bei der eine Kollision zwischen Werker und Roboter ausgeschlossen ist, lässt der Sicherheitsansatz in Kategorie IV einen Kontakt durch die Roboterbewegung zu. Eine Sonderform der Mensch-Roboter-Kooperation mit dem Sicherheitsansatz der Leistungs- und Kraftbegrenzung stellt das Prinzip der Koexistenz dar. Trotz eines überschneidenden Arbeitsraums wird die Gefahr einer Kollision zwischen Mensch und Roboter nicht vollständig ausgeschlossen. Allerdings kann durch eine zeitliche Trennung das Risiko einer Kollision und die damit verbundene Gefährdung des Mitarbeiters minimiert werden.
Partizipativer Implementierungsprozess der Mensch-Roboter-Kooperation
Die Integration neuer Produktionstechnologien verlangt einen umfassenden Planungsprozess unter Zuhilfenahme bekannter Methoden und Ansätze. Die bisher geringe Anzahl der im Serienbetrieb befindlichen Anlagen bestätigt die Komplexität einer Mensch-Roboter-Kooperation sowie deren notwendigen Prozess zur Umsetzung. Bild 2 veranschaulicht die Vorgehensweise, welche nachfolgend im Text näher erläutert wird.
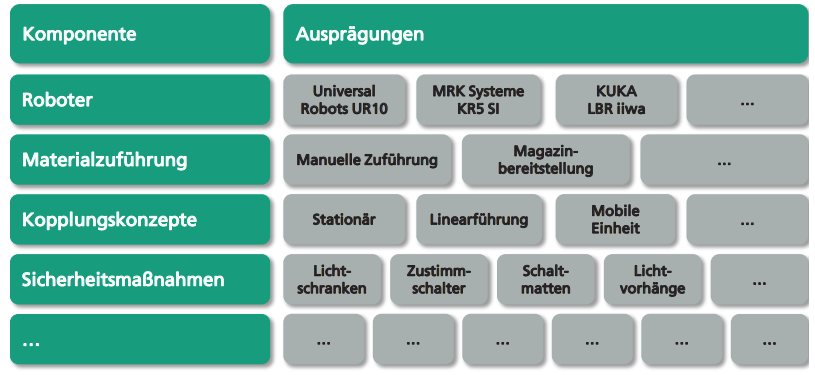
Zur Identifikation von wirtschaftlichen Einsatzgebieten einer Mensch-Roboter-Kooperation bestehen grundsätzlich zwei Möglichkeiten: Über ein Screening – der sogenannte Top-Down-Ansatz – des gesamten Montagesystems werden die Montagestationen unter dem Filter der Zielkriterien Qualität, Ergonomie sowie Produktivität extrahiert. Alternativ ist mit einer Expertenbefragung der Bottom-up-Ansatz möglich. Dabei werden beispielsweise Vertreter der Produktion in den Findungsprozess involviert, um Montagestationen mit Ergonomie- und Qualitätsdefiziten sowie Produktionsengpässen zu identifizieren. Nach einer erfolgreichen Identifikation bilden zunächst eine Analyse und Dokumentation der Arbeits- und Umfeldbedingungen sowie der betroffenen Prozessabläufe und -anforderungen die Grundlage für eine Konzepterstellung. Ein entwickelter Morphologischer Kasten dient zur Grobplanung serienfähiger Montagekonzepte unter Berücksichtigung aller nötigen technischen Parameter. Bild 3 zeigt eine Auswahl der Komponenten mit möglichen Ausprägungen.
Nach erfolgreicher Konzepterstellung von mindestens drei Vorzugsvarianten sind diese durch frühzeitige Integration aller beteiligten Nutzergruppen zu bewerten. Dazu sind unter anderem Produktionsmitarbeiter, Vorarbeiter, Instandhalter sowie Arbeitssicherheitsspezialisten dazu aufgefordert, die Konzepte nicht nur hinsichtlich Kosten, Qualität und Ergonomie zu bewerten, sondern unter anderem auch die Instandhaltungsfreundlichkeit, mögliche Notfallstrategien und Sicherheitsszenarien für den Personenschutz einzuschätzen.
Diese Vorgehensweise trägt bereits in der frühen Phase der Planung zur Sensibilisierung auf Mitarbeiterebene bei und sichert die Berücksichtigung aller technischen Anforderungen, die an das Produktionssystem im Laufe dessen Lebenszyklus gestellt werden. Gleichzeitig fördert der partizipative Ansatz die Akzeptanz beim Mitarbeiter und entkräftet Bedenken hinsichtlich der Arbeitsteilung und Sicherheit bei der Zusammenarbeit von Menschen und Robotern in einem Arbeitsraum.
Die weiterführende Simulation und 3D-Visualisierung des priorisierten Konzeptes dient neben einem theoretischen Nachweis der technischen Machbarkeit auch zur Bewertung der Chancen und Risiken einer Mensch-Roboter-Kooperation. Die Planungsphase endet mit dem prototypischen Aufbau, um die technische Machbarkeit nachzuweisen. Wichtiger Bestandteil der Erprobungen ist neben der Lösung technischer Fragestellungen vor allem die Gestaltung eines umfassenden Sicherheitskonzeptes mit dem Ziel eines sicheren, normkonformen und zertifizierten Serienbetriebs.
Ausblick
Um eine flächendeckende Implementierung dieser Systeme im produzierenden Bereich zu ermöglichen, ist es notwendig, Montageanwendern und -ausrüstern Werkzeuge und Planungstools bereitzustellen. Diese müssen von der Identifizierung von Potentialen, einer strukturierten Konzeptphase bis hin zur Möglichkeit einer Einbindung aller betroffenen Personengruppen für eine erfolgreiche Implementierung reichen. Dadurch können flächendeckende Kosten und Effizienzvorteile im produzierendem Gewerbe ermöglicht werden.
Literatur
[1] Brecher, C.; Karmann, O.; Kozielski, S. (2011): Integrative Produktionstechnik für Hochlohnländer. Berlin, Heidelberg: Springer-Verlag.[2] Schenk, M. (2015): Produktion und Logistik mit Zukunft: Digital Engineering and Operation. Berlin, Heidelberg: Springer-Vieweg.
[3] Lotter, B.; Wiendahl, H.-P. (2012): Montage in der industriellen Produktion. Berlin, Heidelberg: Springer-Verlag.
[4] Schenk, M.; Müller, E.; Wirth, S. (2014): Fabrikplanung und Fabrikbetrieb. Methoden für die wandlungsfähige, vernetzte und ressourceneffiziente Fabrik. Berlin: Springer-Verlag.
[5] DIN EN ISO 8373 (2011): Roboter und Robotikgeräte. Berlin: Beuth Verlag.
[6] Beumelburg, K. (2005): Fähigkeitsorientierte Montageablaufplanung in der direkten Mensch-Roboter-Kooperation. Stuttgart: Universität Stuttgart.
[7] Ross, P. (2002): Bestimmung des wirtschaftlichen Automatisierungsgrades von Montageprozessen in der frühen Phase der Montageplanung. München: Utz Verlag. Maschinenrichtlinie 2006/42/EG (2006).
[8] DIN EN ISO 12100 (2011): Sicherheit von Maschinen. Allgemeine Gestaltungsleitsätze. Risikobeurteilung und Risikominderung. Berlin: Beuth Verlag
[9] Bautz, V. (2015): Zusammenarbeit mit Robotern. Tag der Arbeitssicherheit. Arbeitskreis für Arbeitssicherheit Baden-Württemberg des Landesverbandes Südwest der Deutschen Gesetzlichen Unfallversicherung. Fellbach, 25.03.2015.






