
Sichere Mensch-Roboter-Kollaboration in der MontageInnovative Sicherheitskonzepte für eine effiziente Zusammenarbeit
Lesedauer: 8 Minuten
|

Die zunehmende Automatisierung und der wachsende Bedarf an Flexibilität in der industriellen Produktion haben zur Entwicklung kollaborativer Robotersysteme (Cobots) geführt. Diese enge Zusammenarbeit zwischen Mensch und Maschine erfordert jedoch smarte Robotersysteme, die flexibel und autonom agieren können. Ein Problem tritt auf, wenn die Produktivität aufgrund reduzierter Robotergeschwindigkeiten zugunsten der Sicherheit sinkt. Ein Erfolgsfaktor ist, die Zusammenarbeit so zu gestalten, dass sie trotz aller Herausforderungen effizient und sicher ist.
Die Etablierung und wachsende Nachfrage von Cobots in der flexiblen Produktion erfordern eine Zusammenarbeit zwischen Mensch und Robotern. In Bild 1 ist dieser Zusammenhang in der Kooperation abgebildet. Je enger der Mensch mit dem Roboter zusammenarbeitet, desto mehr Möglichkeiten ergeben sich in Bezug auf eine flexible Lösungsfindung für komplexe Aufgaben. Gleichzeitig steigen die Anforderungen an die Sicherheit, welche meist mit einer verringerten Robotergeschwindigkeit einhergehen. Unternehmen stehen daher häufig vor einem Zielkonflikt zwischen Produktivität und Flexibilität/Sicherheit.
Smarte Robotersysteme [1] helfen diesen Konflikt aufzulösen, indem sie flexibel und autonom auf Veränderungen in ihrer Umgebung reagieren.

Ohne zusätzlichen Programmieraufwand können sie neue Aufgaben übernehmen und gleichzeitig sichere Interaktionen mit Menschen gewährleisten. Dies ermöglicht eine höhere Produktivität und gleichzeitig mehr Sicherheit durch Echtzeitanpassungen der Roboterbewegungen.
Kollaborierender Betrieb von Robotern
Damit smarte Robotersysteme in der MRK eingesetzt werden dürfen, müssen sie den Richtlinien für einen sicheren, kollaborierenden Betrieb nach DIN ISO/TS 15066 [3] entsprechen. Die Norm beschreibt dafür vier kollaborative Betriebsarten von Robotern, die in Bild 2 zu sehen sind. Smarte Robotik in der MRK muss die Rahmenbedingungen einer oder mehrerer dieser Betriebsarten erfüllen, um in der industriellen Montage zum Einsatz zu kommen.
Beim sicherheitsbewerteten überwachten Halt sind die Arbeitsbereiche von Mensch und Roboter klar voneinander getrennt. Sobald der Mensch in den Arbeitsbereich des Roboters eintritt, hält dieser sofort an und arbeitet erst dann weiter, wenn der Mensch den Bereich verlassen hat. Durch dieses Verfahren können Roboter ohne physischen Schutzzaun betrieben werden.
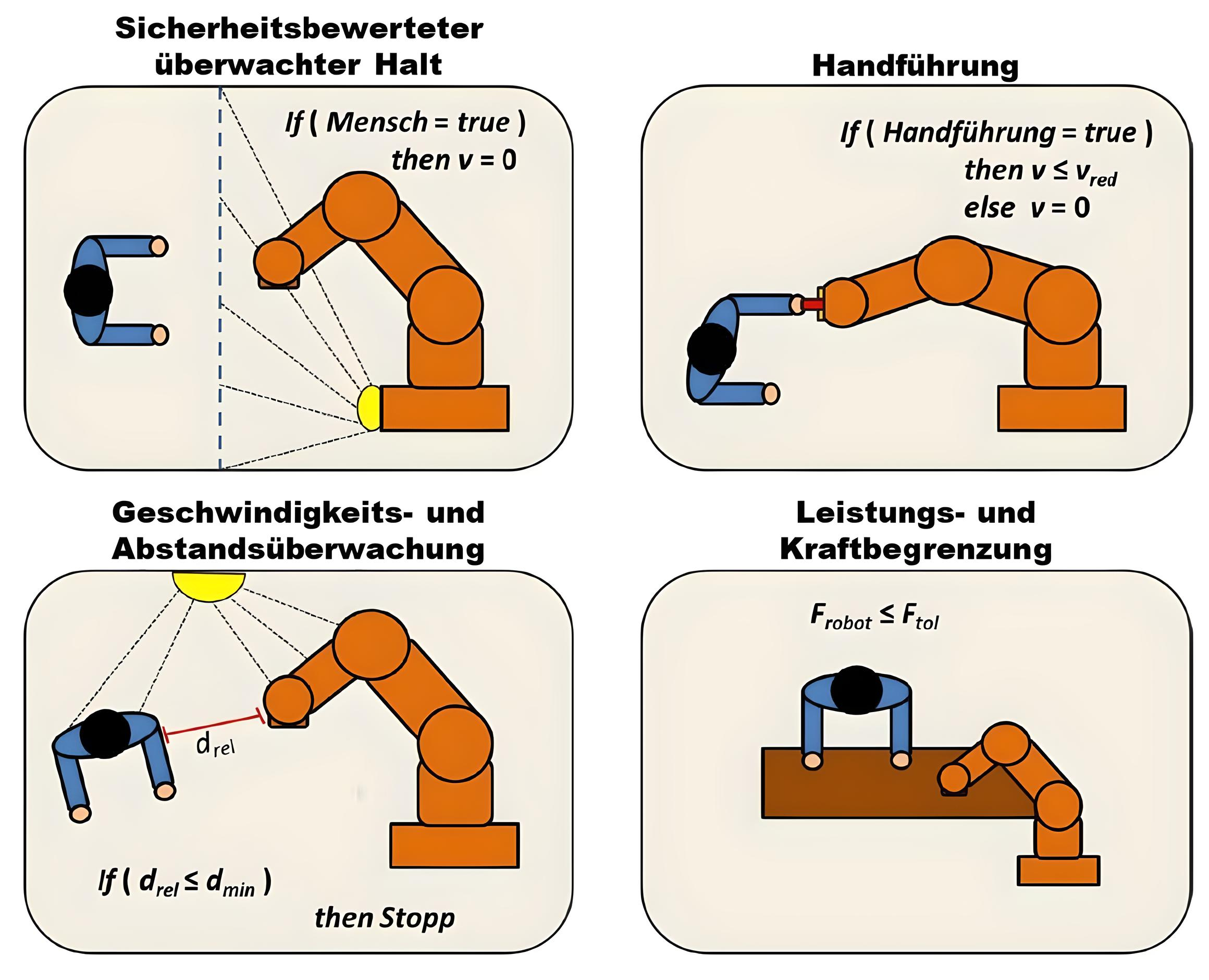
Bei der Handführung gibt der Mensch dem Roboter Bewegungsbefehle durch eine handbetätigte Führungseinrichtung am Endeffektor. Mensch und Roboter befinden sich dabei zur gleichen Zeit im gemeinsamen Arbeitsraum. Das Verfahren der Handführung wird beim Einlernen neuer Punkte, zum Beispiel für Schweißanwendungen, verwendet. Bevor der Betriebsmodus der Handführung vom Menschen aktiviert werden darf, muss sich der Roboter im sicherheitsbewerteten überwachten Halt befinden.
Die Geschwindigkeits- und Abstandsüberwachung erlaubt, dass Mensch und Roboter zur gleichen Zeit im gemeinsamen Arbeitsraum agieren dürfen, solange ein Sicherheitsabstand zwischen beiden eingehalten wird. Dieser Sicherheitsabstand hängt von der Geschwindigkeit des Roboters ab und vergrößert sich, je schneller der Roboter fährt.
Die Leistungs- und Kraftbegrenzung erlaubt den direkten physischen Kontakt zwischen Mensch und Roboter. Dieser kann unabsichtlich – wie durch eine Kollision – oder beabsichtigt – beispielsweise durch das Verwenden des Roboters als dritte Hand – erfolgen. Bei dieser Betriebsart dürfen Gefährdungen durch das System bestimmte Belastungsgrenzwerte nicht überschreiten.
Technologien und Sicherheitsstrategien für dynamische Arbeitsumgebungen
Aktuelle technologische Ansätze zur sicheren Mensch-Roboter-Kollaboration (MRK) zeichnen sich durch eine Kombination bewährter Schutzmechanismen und moderner Sensortechnologien aus, die das Ziel verfolgen, Mensch und Roboter effizient und sicher, gemäß DIN ISO/TS 15066, in einem gemeinsamen Arbeitsumfeld agieren zu lassen. Der Stand der Technik adressiert folgende Herausforderungen:
- Wie kann man Kollisionen zwischen dem Roboter und dem Menschen erkennen und vermeiden?
- Wie kann man die Konsequenzen von unvermeidbaren Kollisionen mindern?
- Wie kann und soll der Roboter auf unvorhersehbare Veränderungen der Arbeitsumgebung (z. B. unbekannte Objekte, Abweichungen im Montageablauf) reagieren?
Ein vielversprechender Lösungsansatz zur Bewältigung der ersten Herausforderung ist die klassische Einhausung (nicht kollaborativ) oder der sicherheitsbewertete überwachte Halt (kollaborativ) des Roboters. Dabei kommen sowohl physische Barrieren wie Schutzzäune oder Gehäuse als auch Lichtgitter zum Einsatz, um eine klare Trennung zwischen Mensch und Roboter zu gewährleisten. Diese Maßnahmen tragen dazu bei, ein sicheres Arbeitsumfeld zu schaffen und potenzielle Gefahren zu minimieren.
Für die zweite Herausforderung spielt der Einsatz von Kraftsensorikund Sensorhäuten eine entscheidende Rolle. Diese Technologien ermöglichen es dem Roboter, Berührungen oder Kräfte zu erkennen, die auf ihn einwirken. Im Falle eines Kontakts mit einem Menschen kann der Roboter seine Bewegungen adaptiv nachgeben oder stoppen. Solche Sensoren bieten einen effektiven Schutzmechanismus, da der Roboter direkt auf physische Interaktionen reagiert und somit das Risiko von Verletzungen verringert. Die genannten Technologien fallen in den Bereich der Leistungs- und Kraftbegrenzung.
Mit moderner Sensorik lassen sich die Problemstellungen der dritten Herausforderung angehen. Für die Arbeitsraumüberwachung werden Kameras, Lidar- oder Ultraschallsensoren eingesetzt. Basierend auf diesen Informationen kann der Roboter mit einer Bewegungsanpassung, Reduzierung der Geschwindigkeit oder einem Sicherheitsstopp reagieren. Diese Technologien sind in der Betriebsart der Geschwindigkeits- und Abstandsüberwachung angesiedelt.
Obwohl die beschriebenen Methoden die Zusammenarbeit zwischen Mensch und Roboter ermöglichen, sind sie nicht in der Lage, alle oben genannten Herausforderungen umfassend zu adressieren. Insbesondere in hochdynamischen Prozessen bleibt die Frage nach einem geeigneten Lösungsansatz bestehen. Es ist entscheidend, innovative Strategien zu entwickeln, die sowohl die Sicherheit als auch die Effizienz in sich ständig verändernden Arbeitsumgebungen gewährleisten und verschiedene Betriebsarten der kollaborativen Robotik miteinander kombinieren.
Echtzeit-Kollisionserkennung und -vermeidung für eine sichere MRK
Das Center für Robotik (CERI) der Technischen Hoch- schule Würzburg-Schweinfurt (THWS) hat mehrere Lösungsansätze für oben genannte Herausforderungen entwickelt, z.B. eine Anomalieerkennung im Arbeitsab- lauf [5], dynamische Planungs- und Kommunikations- methoden [6, 7] sowie innovative Konzepte zur reaktiven Robotersteuerung [8].
Besonders das reaktive Verhalten des Roboters zur Echtzeit verspricht einen bahnbrechenden neuen Ansatz zur sicheren MRK in der industriellen Montage. Dabei ist es entscheidend, den Arbeitsbereich von Mensch und Roboter geometrisch genau zu erfassen.
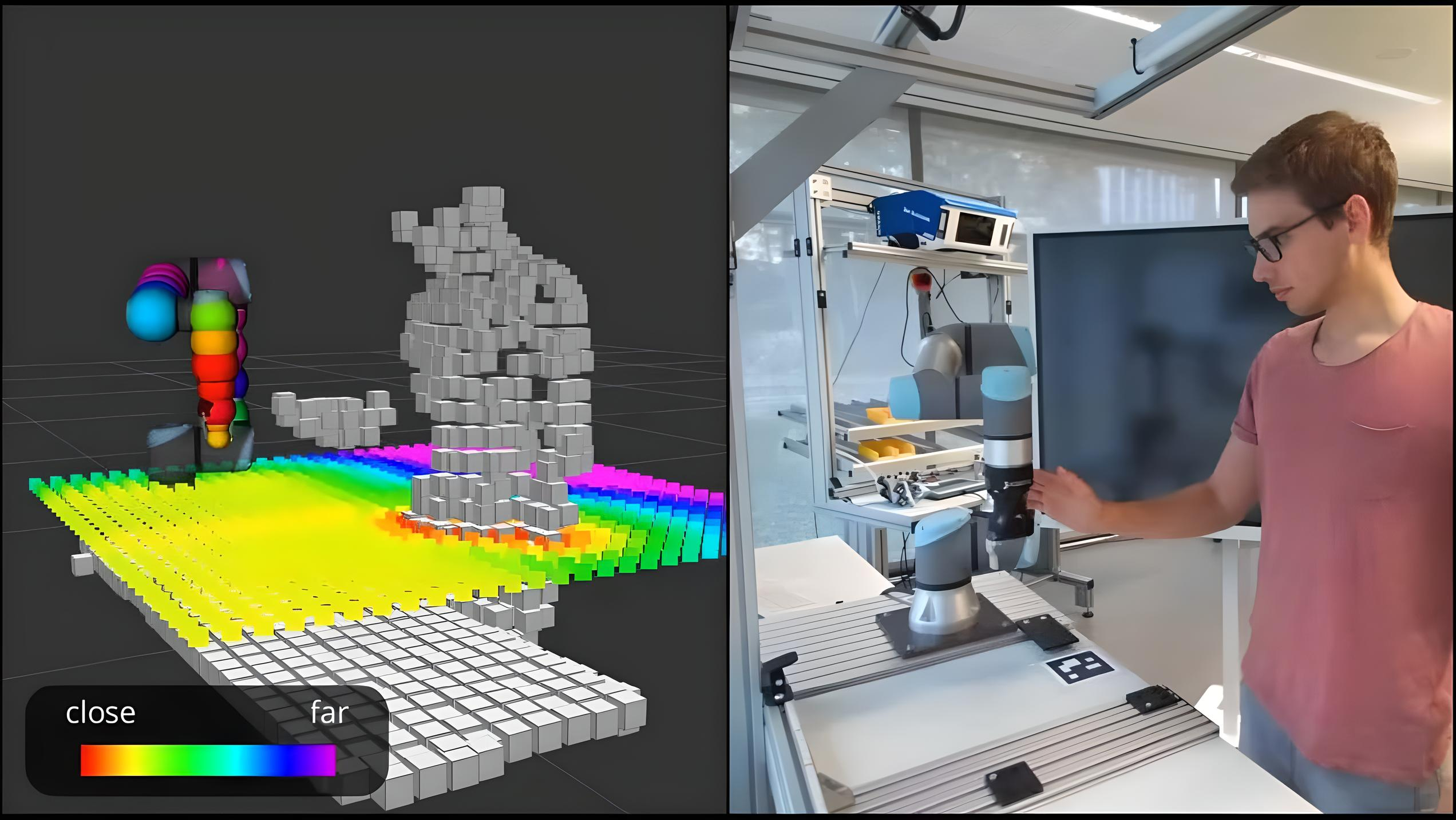
Die von Tiefenkameras bereitgestellten Informationen können mithilfe von Distanz- und Gradientenfeldern interpretiert werden, welche die Umgebung repräsentieren und mit bewegten Objekten umgehen können. Das Distanzfeld beschreibt für jeden Punkt im Raum den Abstand zum nächstgelegenen Objekt. Das Gradientenfeld beschreibt die Richtung weg vom nächstgelegenen Objekt (beide Felder sind in Bild 3 grafisch dargestellt). Mit diesen Informationen kann man Roboterbewegungen erzeugen, die möglichst weit von Hindernissen entfernt und damit sicher sind.
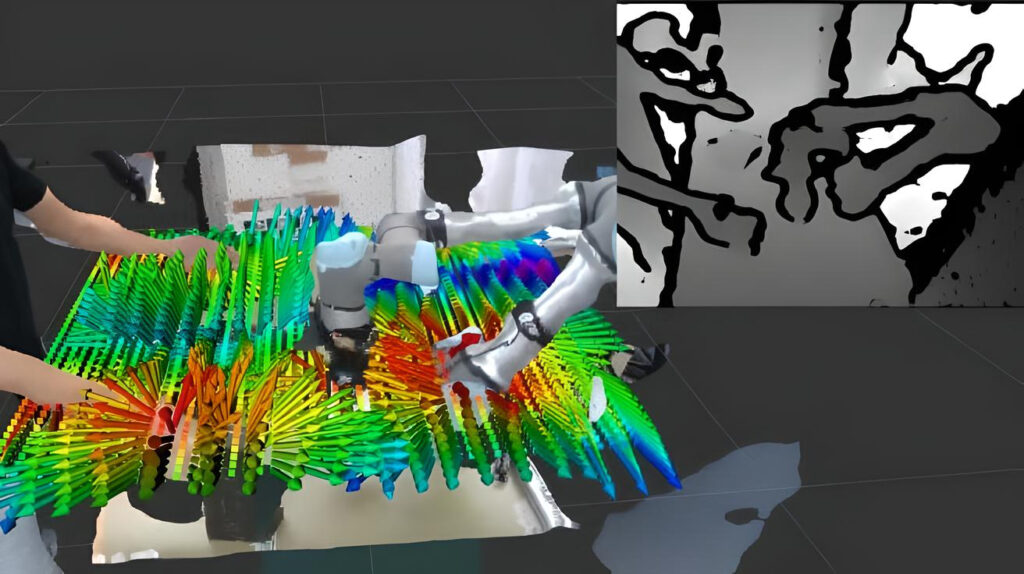
Diese Echtzeitanalyse ermöglicht es dem Cobot, flexibel auf Veränderungen in seiner Umgebung zu reagieren und seine Bewegungsmuster dynamisch anzupassen. Bild 4 zeigt das Interactive Distance Field Mapping and Planning (IDMP) Framework. Dieses nutzt dabei die Tiefendaten der Kamera, um eine kontinuierlich aktualisierte Karte der Umgebung zu erzeugen [8]. Diese Karte ist entscheidend, um Kollisionen mit dynamischen Objekten, wie menschlichen Bedienern oder sich bewegenden Gegenständen, zu vermeiden. Das erlaubt einen kollaborativen Betrieb mit Geschwindigkeits- und Abstandsüberwachung.
Dank der kontinuierlichen Datenfusion der aktuellen Sensordaten mit früheren Messungen kann das System dynamische Objekte in Echtzeit erfassen und veraltete Informationen effizient entfernen. Dies stellt sicher, dass der Roboter immer auf die aktuelle Szene reagiert, ohne von irrelevanten oder überholten Daten beeinträchtigt zu werden. Durch die nahtlose Integration von Distanzfeldern mit gradientenbasierten Bewegungsplanern kann der Cobot seine Bewegungswege schnell und zuverlässig anpassen. Für den im Bild 4 gezeigten Arbeitsraum läuft das System mit einer Aktualisierungsfrequenz von 70 bis 100 Hz auf einem gewöhnlichen CPU-basierten Rechner.
Ausblick: Erweiterung durch semantische Informationen
Neben Tiefeninformationen können über das RGB-Bild auch semantische Informationen der Szene extrahiert und mit dem zuvor beschriebenen Verfahren fusioniert werden. Dabei lassen sich spezifische Körperbereiche des Menschen, wie Kopf, Arme, Hände und Beine, eindeutig durch Detektionsalgorithmen segmentieren und somit unvermeidbare Kollisionen gemäß der DIN ISO/TS 15066 [3] bewerten. Dies liefert zusätzliche Informationen, die für eine genauere Erfassung der menschlichen Aktivitäten genutzt werden können.
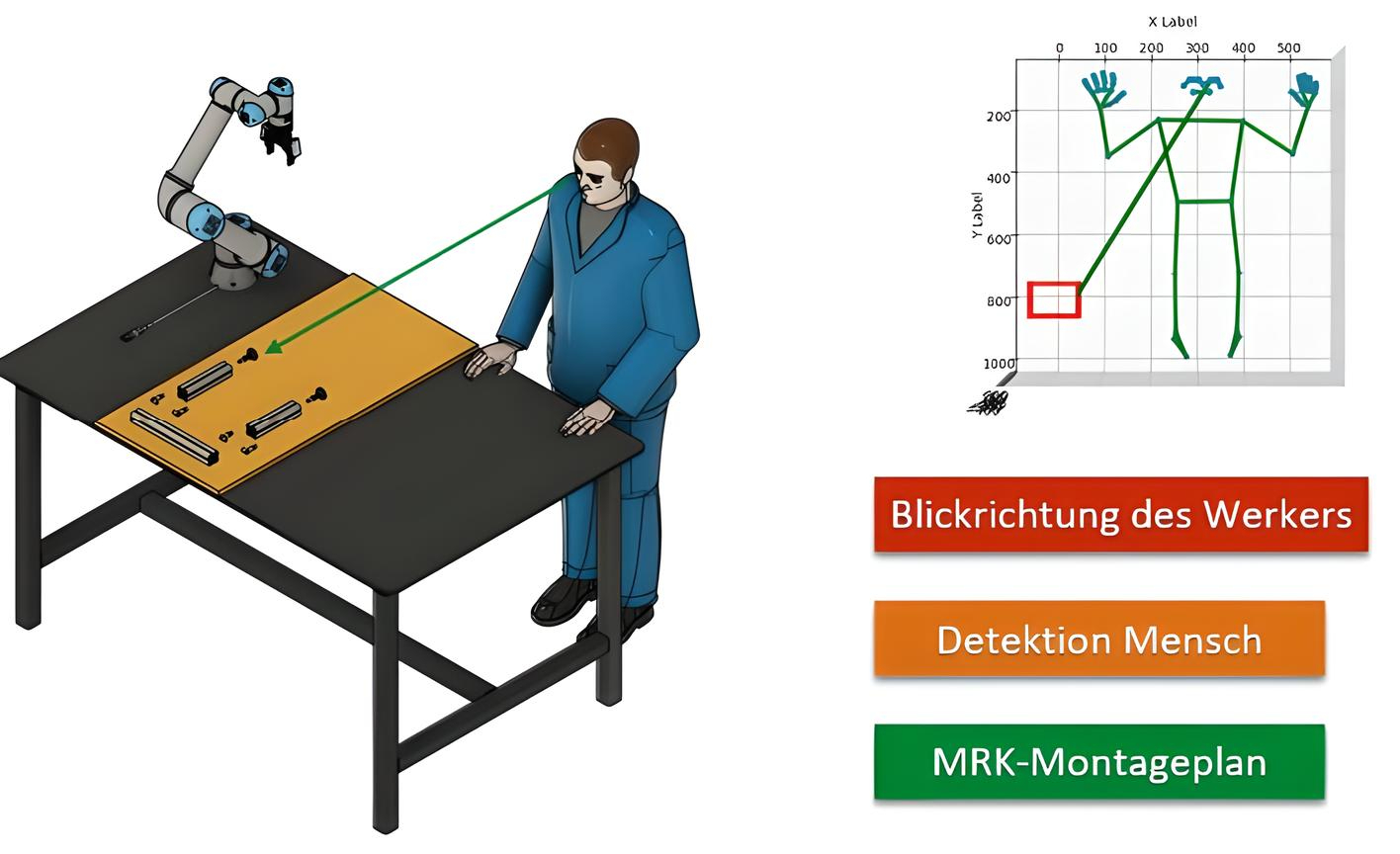
Basierend auf dem MRK-Montageplan [6] hat der Roboter bereits ein Verständnis für die benötigten Bauteile und Werkzeuge. Werden diese Informationen mit den menschlichen Bewegungsmustern, der Blickrichtung des Werkers und der Detektion des Werkers verknüpft, lassen sich fundierte Rückschlüsse auf die nächsten Aktionen des Menschen ziehen, siehe Bild 5. Dies ermöglicht eine Vorhersage zukünftiger Bewegungen und erweitert das reaktive Verhalten des Roboters um ein proaktives, vorausschauendes Verhalten.
Die erfolgreiche Implementierung kollaborativer Robotersysteme erfordert jedoch mehr als technologische Innovationen. Es bedarf einer durchdachten Planung und klaren Kommunikation zwischen allen Beteiligten, um Sicherheitsstandards, ergonomische Anforderungen und rechtliche Aspekte zu berücksichtigen und Sicherheitsnormen weiterzuentwickeln. Nur so lässt sich die Symbiose von menschlicher Flexibilität und maschineller Präzision voll ausschöpfen, um Produktionsprozesse sicher, effizient und zukunftsfähig zu gestalten.
DOI: https://doi.org/10.30844/FID.24.6.TK
CERI
Das Center für Robotik ist ein Forschungsinstitut der Technischen Hochschule Würzburg- Schweinfurt. Weiterführende Informationen zur MRK-Forschung (Videos, Code, Veröffentlichungen) sind auf unserer Webseite zu finden.
Literatur
[1] Rat für technologische Souveränität, beauftragt vom BMBF (2023): Positionspapier Smarte Robotik[2] Kaupp, T., Schmitt, J., Hillenbrand, A., & Kranz, P. (2021). Das hybride Team: ein Leitfaden zur systematischen Planung von assistierten, kollaborativen Mensch-Roboter-Arbeitsplätzen in der Montage. FHWS Science Journal, 5(2), 12-72.
[3] DIN. (2017). DIN ISO/TS 15066: 2017-04; DIN SPEC 5306: 2017-04 DIN SPEC 5306: 2017-04 Roboter und Robotikgeräte – Kollaborierende Roboter (ISO/TS 15066: 2016).
[4] Müller, R., Franke, J., Henrich, D., Kuhlenkötter, B., Raatz, A., & Verl, A. (2023). Handbuch Mensch-Roboter-Kollaboration. Carl Hanser Verlag GmbH Co KG.
[5] Schirmer, F., Kranz, P., Schmitt, J., & Kaupp, T. (2023, March). Anomaly Detection for Dynamic Human-Robot Assembly: Application of an LSTM-based autoencoder to interpret uncertain human behavior in HRC. In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (pp. 333–337).
[6] Schirmer, F., Kranz, P., Rose, C. G., Schmitt, J., & Kaupp, T. (2023, July). Holistic Assembly Planning Framework for Dynamic Human-Robot Collaboration. In International Conference on Intelligent Autonomous Systems (pp. 215–227). Cham: Springer Nature Switzerland.
[7] Schirmer, F., Kranz, P., Bhat, B., Rose, C. G., Schmitt, J., & Kaupp, T. (2024, March). Towards a Path Planning and Communication Framework for Seamless Human-Robot Assembly. In Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (pp. 960–964).
[8] Ali, U., Wu, L., Müller, A., Sukkar, F., Kaupp, T., & Vidal-Calleja, T. (2024). Interactive distance field mapping and planning to enable human-robot collaboration. IEEE Robotics and Automation Letters. https://doi.org/10.1109/LRA.2024.3482128
Potenziale: Prozesse automatisieren
Lösungen: Robotik






