
Produktivitätssteigerung durch kollaborierende RobotersystemeOptimierung von Prozessen durch intelligente Mensch-Maschine-Interaktion
von Marc-André Weber
Lesedauer: 6 Minuten
|
Kollaborierende Roboter, auch Cobots genannt, kombinieren die Stärken von Mensch und Roboter am Arbeitsplatz. Die Prozess- und Produktivitätsverbesserung drückt sich durch Zeit-, Kosten-, Ergonomie- und Qualitätsvorteile aus. In diesem Artikel wird gezeigt, wie Praktiker vorgehen sollten, wenn sie diese Robotersysteme nutzen wollen.
Klassifikation industrieller Roboternutzung
Menschen und Roboter können auf verschiedene Art in einem Raum arbeiten. Neben der seit Jahrzehnten bekannten Vollautomatisierung haben sich in den letzten Jahren neue Formen entwickelt, die sich immer stärker in der Industrie etablieren (Bild 1).
![Formen von Arbeitsplätzen mit Robotern (in Anlehnung an [1])](https://factory-innovation.de/wp-content/uploads/2019/10/Weber_FI-19-2_Bild-1-1024x434.jpg)
Vollautomatisierung beschreibt die getrennte Arbeit von Mensch und Roboter in eigenen Arbeitsbereichen. Klassischerweise werden hierbei Roboter von Schutzzäunen umgeben, sodass der Mensch nicht Gefahr läuft, verletzt zu werden. Berührungen sind folglich ausgeschlossen. Mensch-Roboter-Koexistenz beschreibt getrennte Arbeitsbereiche, die jedoch keinen Schutzzaun haben. Mit Hilfe intelligenter Sensorik wird erkannt, sobald ein Mensch den Arbeitsbereich des Roboters betritt, woraufhin der Roboter umgehend stoppt, um Gefährdungen auszuschließen. Mensch-Roboter-Kooperation beschreibt die Nutzung eines überlappenden Arbeitsbereichs für in der Regel sequentielle Tätigkeiten von Mensch und Roboter. Wie im zuletzt genannten Fall sind Berührungen möglich, aber auch hier prinzipiell nicht erwünscht.
Zuletzt beschreibt die Mensch-Roboter-Kollaboration (MRK) eine Interaktionsform, bei der nicht mehr unterschieden wird zwischen einem Arbeitsraum für den Roboter und einem für den Menschen. Berührungen werden grundsätzlich als prozesstechnisch notwendig und erwünscht angesehen. Unbeabsichtigte Berührungen müssen jedoch – wie auch bei der Koexistenz und Kooperation – als solche erkannt und mit angemessenen Reaktionen des Roboters versehen werden, um keine Verletzungen zu verursachen [2]. Ermöglicht wird dies durch eine intelligente Sensorik in Kombination mit (begrenzter) künstlicher Intelligenz in Form hochentwickelter Softwaresysteme. Diese vergleichsweise neuartige Roboterkategorie gilt als eine Form der sogenannten Industrie 4.0 bzw. der Digitalisierung in industriellen Produktionssystemen und wird in diesem Artikel betrachtet.
Produktiver Einsatz kollaborierender Robotersysteme
Kollaborierende Robotersysteme finden dort Anwendung, wo die Stärken des Menschen mit den Stärken eines Roboters verbunden werden sollen. Sie werden genutzt, wenn eine manuelle Arbeit überwiegt, die zu fertigende Mindeststückzahl aber groß genug ist, um die Anschaffungs- und Rüstkosten für ein solches Robotersystem zu rechtfertigen [3]. Aus diesem Grund ist das Prozessdesign wichtig, um die Wirtschaftlichkeit des Robotereinsatzes sicherzustellen.
![Vorgehensmodell zur Prüfung auf Eignung für kollaborierende Roboter (in Anlehnung an [2])](https://factory-innovation.de/wp-content/uploads/2019/10/Weber_FI-19-2_Bild-2.jpg)
Zu den menschlichen Stärken zählen Intuition, Flexibilität, Entscheiden und Urteilen. Roboter überzeugen hingegen mit ausdauernden, reproduzierbaren und präzisen Bewegungen. Durch die kollaborative Zusammenarbeit können physische Belastungen des Menschen verringert werden, etwa wenn der Roboter Arbeitsbestandteile wie das Handhaben schwerer Lasten übernimmt. Durch die Optimierung von Arbeitsabläufen unter Einsatz kollaborierender Roboter können diese effizienter gestaltet werden. Dadurch wird die Produktivität manueller Arbeitsplätze erhöht, welche sich für eine Vollautomatisierung aus verschiedenen Gründen nicht eignen. Eine empfohlene Vorgehensweise für Unternehmen, die aufgrund der genannten Aspekte überlegen kollaborierende Roboter zu nutzen, ist nachfolgend skizziert (Bild 2). Zunächst ist zu prüfen, ob prozesstechnisch überhaupt eine kollaborative Zusammenarbeit möglich ist, d. h. die Arbeitsorganisation gibt den weiteren Prüfverlauf vor. Im nächsten Schritt ist die Bauteileignung zu untersuchen. So eignen sich in der Regel beispielsweise scharfe oder heiße Bauteile ebenso wenig wie biegeschlaffe Komponenten für eine Arbeit mit kollaborierenden Robotern.
Anschließend ist die Roboteranlage, welche genutzt werden soll, zu prüfen hinsichtlich ihrer Eignung für den Kollaborationsbetrieb. Es empfiehlt sich, speziell hierfür vorgesehene Roboter von Fachherstellern zu erwerben. Anschließend erfolgt die Prüfung des Arbeitsplatzes, an dem MRK eingesetzt werden soll.
Aspekte wie die Positionierung des Roboters und das Handling der Werkstücke und Werkzeuge spielen hierbei eine Rolle. Zudem muss neben einer Vielzahl Normen und gesetzlicher Vorschriften, die allgemein für industrielle Roboteranlagen gelten, die ISO/TS 15066 beachtet werden, welche einen Schwerpunkt auf der Gewährleistung des sicheren Einsatzes von MRK legt. Im Anschluss wird geprüft, ob das Personal, welches an dem betrachteten MRK-Arbeitsplatz tätig sein soll, ausreichend qualifiziert ist. Eventuell ist ein zusätzlicher Schulungsbedarf zu decken. Zuletzt wird die voraussichtliche Wirtschaftlichkeit ermittelt unter Beachtung von Kosten aus den vorherigen Prüfschritten [2].
Verdeutlichung des Produktivitätsnutzens
Mit dem nachfolgenden Fallbeispiel soll die Produktivitätswirkung des Einsatzes von MRK verdeutlicht werden. Dazu wird verglichen, wie sich ein Arbeitsprozess verändert, wenn ein kollaborierender Roboter integriert wird und es werden wesentliche Kennzahlen genannt (ohne Detailangaben). Der betrachtete Arbeitsplatz besteht aus einem Werktisch, an dem ein Werker ein Bauteil montiert. Dem Werker gegenüber befindet sich ein Roh- und Fertigteilelager, links ein Kleinteilelager und rechts eine Ablage für Werkzeuge, wobei ein Schraubendreher und eine Zange verwendet werden. Wird ein Roboter in diesen Arbeitsplatz integriert, so kann dieser auf das Roh- und Fertigteilelager zugreifen und wird folglich zwischen diesen und dem Werktisch platziert (Bild 3).
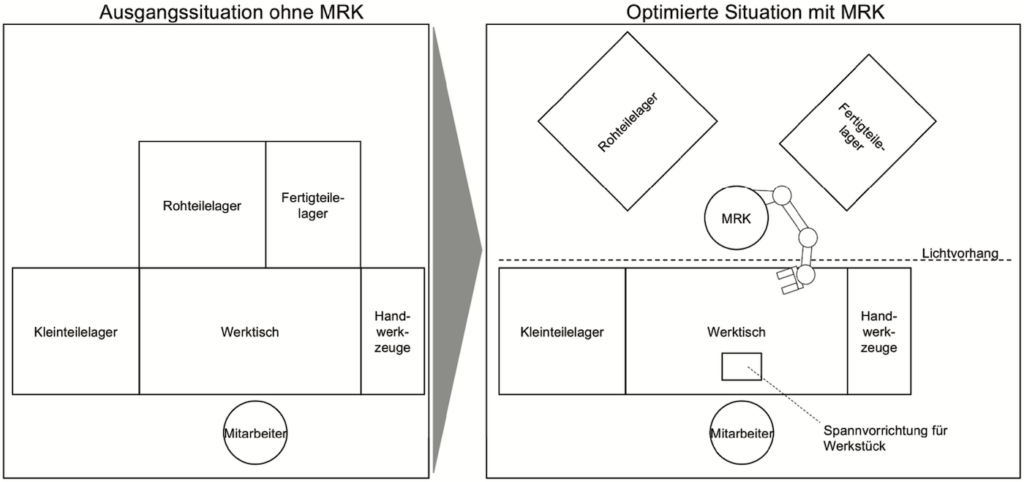
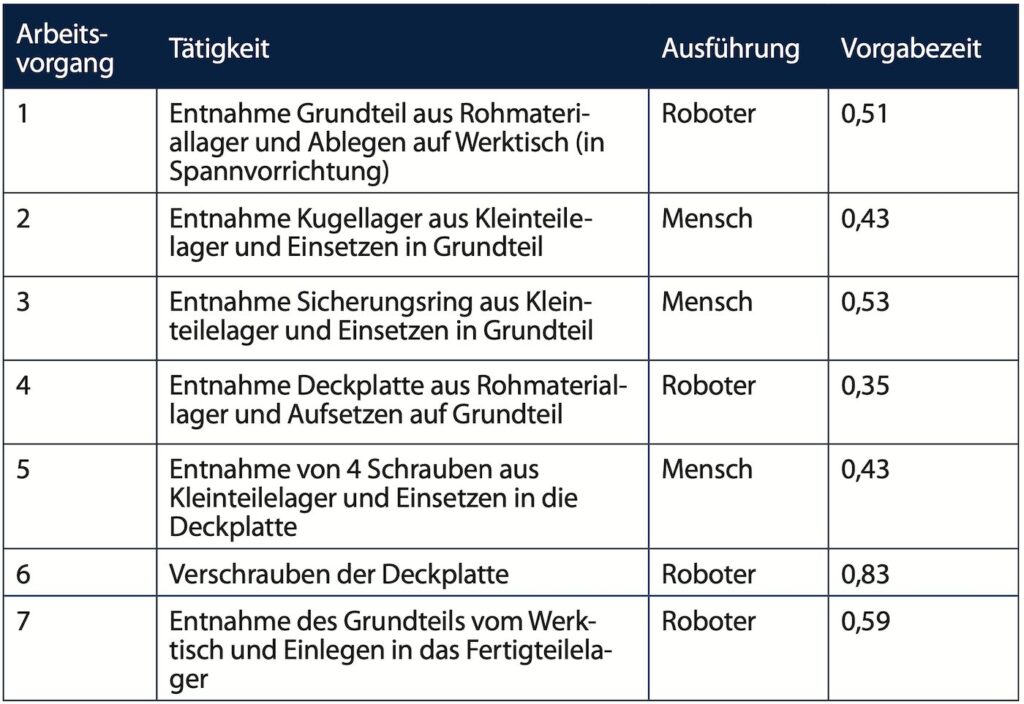
Es wird ein Montageprozess für eine Wellenaufnahme inklusive Lagerung betrachtet. Es sind vier Bauteile zu montieren: Grundteil, Kugellager, Sicherungsring für das Kugellager und Abdeckplatte, die mit vier Schrauben fixiert wird. Für diese Bearbeitungen wird eine Durchlaufzeit von 3,43 Zeiteinheiten bei ausschließlich manueller Montage angenommen. Das Enderzeugnis ist mit einem Gewicht von 5,4 Kilogramm angegeben. Mit dem kollaborierenden Roboter sollen kosten-, zeit-, ergonomie- und qualitätsbezogene Aspekte verbessert werden. Als Kostensätze werden 39,30 Euro je Mitarbeiter- und 12,72 Euro je Maschinenstunde angenommen. Die Montagezeit soll durch schnellere Bewegungsabläufe sowie parallele Tätigkeiten zwischen Mensch und Roboter reduziert werden. Der Roboter kann hinter einer Lichtschranke, wodurch sichergestellt wird, dass dort kein Mensch ist, mit erhöhter Geschwindigkeit arbeiten. In ergonomischer Hinsicht soll der Werker entlastet werden beim mehrfachen Handling der Bauteile über die Dauer einer Schicht. Insbesondere gilt es, die zu bewegenden Massen zu reduzieren. Die Qualität soll verbessert werden, indem der Roboter die Schraubvorgänge übernimmt und mittels sensorbasierter Drehmomentkontrolle jede Schraube korrekt anzieht.
In diesem einfachen Beispiel wird unter Berücksichtigung der Parallelisierung von Arbeitstätigkeiten eine Verkürzung der Durchlaufzeit um 8,5 Prozent von 3,43 auf 3,14 Zeiteinheiten erreicht. Hierdurch wird in einer achtstündigen Schicht die Produktionsmenge um 9,4 Prozent von 139 auf 152 Stück gesteigert.
Aufgrund unterschiedlicher Stundensätze für Mensch und Roboter sowie der Verteilung der Vorgabezeiten ergibt sich eine Senkung der fertigungsbezogenen Stückkosten um 38,2 Prozent von 2,25 auf 1,39 Euro. Die Kostensenkung und die gesteigerte Produktionsmenge ergänzen sich gegenseitig. Die Ergonomie des Werkers wird durch kürzere Greifwege verbessert, die sich auf die Positionen links und rechts des Werktisches beschränken und das ungünstige Greifen schwerer Teile von bzw. nach vorne vermeiden. Zudem wird deutlich weniger Gewicht gehoben, weil der Roboter insbesondere die Handhabung der schweren Bauteile aus dem Roh- und in das Fertigteilelager übernimmt.
So sind Einsparungen der zu bewegenden Massen im hohen zweistelligen Prozentbereich möglich, wodurch ein wesentlicher Beitrag zur physischen Entlastung des Werkers geleistet wird. Die Qualität wird durch die sichere Verschraubung durch die Drehmomentkontrolle an jeder der vier Schrauben gewährleistet. Es zeigt sich in diesem modellhaften Beispiel, dass Verbesserungen in mehrfacher Hinsicht möglich sein können, wenngleich dies nicht für alle Arbeitsplätze verallgemeinert werden kann.
Kollaborierende Robotersysteme sind eine relativ neue Roboterart, die zunehmend Verbreitung in der Industrie findet und ihre Stärken in der Kombination menschlicher Fähigkeiten mit den Vorteilen eines Roboters sieht. Zur Integration in bestehende Arbeitsplätze lohnt eine strukturierte Analyse der Einsatzmöglichkeiten. Je nach betrachtetem Arbeitsprozess können signifikante Produktivitätspotenziale – bewertet in Zeit und Kosten – gehoben werden, ergänzt durch eine verbesserte Arbeitsplatzergonomie und Produktqualität.
Literatur
[1] Otto, M.; Zunke, R. (2015): Einsatzmöglichkeiten von Mensch-Roboter-Kooperationen und sensitiven Automatisierungslösungen. Zukunft der Arbeit – die neuen Roboter kommen. KUKA. Online verfügbar unter http://www.blog-zukunft-der- arbeit.de/wp-content/uploads/2015/03/03_2015-11-25_IGMetall_Robotik-Fachtagung_ OttoZunke.pdf, zuletzt geprüft am 12.03.2019.[2] Weber, Marc-André; Stowasser, Sascha (2018): Ergonomische Arbeitsplatzgestaltung unter Einsatz kollaborierender Robotersysteme: Eine praxisorientierte Einführung. In: Zeitschrift für Arbeitswissenschaft 72 (4), S. 229–238.
[3] Matthias, B.; Ding, H. (2013): Die Zukunft der Mensch-Roboter Kollaboration in der industriellen Montage. Internationales Forum Mechatronik. Winterthur.
Branchen: Branchenübergreifend






