
Technologien für flexible Robotersysteme Innovative Robotersysteme für Kleinserienfertigung und Einzelstückproduktion
Lesedauer: 9 Minuten
|

Automatisierung mit Industrierobotern ist bisher vor allem für die Großserienproduktion attraktiv. Für Unternehmen mit kleineren Produktionsgrößen bis hin zur Einzelstückfertigung sind die verfügbaren Automatisierungslösungen oft nicht rentabel, da die Anschaffung teuer, die Lösung unflexibel und eine Umrüstung zeitaufwendig sein kann. Im EU-geförderten Projekt SMErobotics entwickelt deshalb ein Konsortium aus Forschungs- und Industriepartnern eine neue Generation von vielseitigen, einfach und schnell anpassbaren Robotersystemen, die auch in kleineren Unternehmen kosteneffektiv den Durchsatz und die Qualität steigern können. Unter Einbindung von Mensch-Roboter-Kollaboration (MRK), einfacher Programmierung, intelligenter Fehlerbehandlung und anderen typischen Schlüsseltechnologien der Industrie 4.0 soll eine moderne robotergestützte Industrieautomatisierung mit flexibler, kundenorientierter Produktionsweise entstehen. Der Beitrag zeigt die aktuellen Ergebnisse des Projekts am Beispiel einer Schweiß- und einer Montageanwendung auf.
Die klassische Automatisierung fokussiert auf Arbeitsschritte, die durch hocheffiziente, stark spezialisierte Maschinen optimiert werden, sowie auf komplexe Fertigungsstraßen „aus einem Guss“, in denen Fertigungsmaschinen meist zentral gesteuert und überwacht werden. Diese Produktionslösungen stoßen in einer immer agiler werdenden Wirtschaft an Grenzen, denn bei Produktwechseln ist der Umrüstaufwand meist hoch. Hinzu kommt die Abhängigkeit von Systemintegratoren auch bei Diagnose und Wartung.
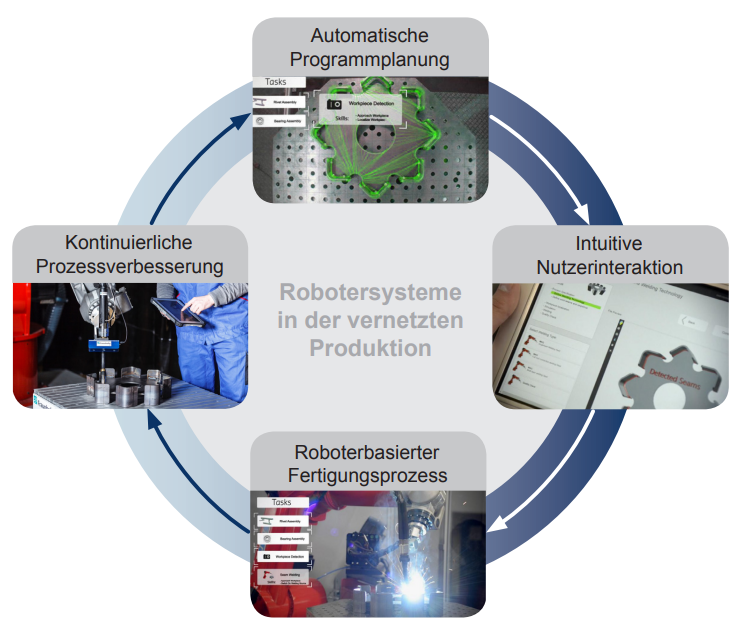
Das Ziel aktueller Entwicklungen in der Robotik und Automatisierung sind daher Maschinen als Schlüsselkomponenten von Industrie-4.0-Systemen, die flexibel dort einsetzbar sind, wo in einer „Just-in-time“-Produktion ein Engpass ist oder eine „dritte Hand“ des Werkers gebraucht wird. Die konsequente Integration intelligenter Planung und sogenannter „kognitiver Techniken“ ermöglicht eine intuitive Mensch-Roboter-Kollaboration und eine schnelle Anpassung der Produktionsprozesse, bei der die Synergien aus menschlicher Fertigkeit und maschineller Präzision und Ausdauer besser genutzt werden können (Bild 1). Die EU-geförderte SMErobotics-Initiative [1] mit Partnern aus Forschungseinrichtungen, Roboterherstellern und Anwendern entwickelt die dazu notwendigen Technologien. Die Ergebnisse des Projekts werden anhand von acht Anwendungsfällen [2] für Montage, Handhabung und Materialbearbeitung zusammen mit Endanwendern evaluiert. Eine Schweiß- und eine Montageanwendung zeigen das Potenzial und die Möglichkeiten, wie eine mit „intelligenten“ Robotern automatisierte Produktion gerade für kleine und mittlere Losgrößen realisierbar ist.
Kognitiver und kollaborativer Schweißassistent
Schweißen zählt zu den verbreitetsten Fertigungsmethoden. Insbesondere in KMU wird es aber vielfach noch manuell durchgeführt, denn robotische Schweißsysteme, wie sie z. B. in der Automobilindustrie eingesetzt werden, sind oft zu unflexibel im Betrieb und deutlich zu aufwendig in der Einrichtung. Am Fraunhofer IPA wurde deshalb in Zusammenarbeit mit KUKA der kognitive und kollaborative Schweißassistent CoWeldRob [3] entwickelt. Er zeigt beispielhaft, wie man den Programmieraufwand für die automatisierte Fertigung bei kleinen und mittleren Produktionsgrößen auf ein Minimum senken kann.
Dabei erfolgt die Programmierung anwendungsorientiert mittels intuitiv bedienbarer, grafischer Nutzerschnittstellen, sodass auch Fachkräfte ohne spezielle Roboterprogrammierkenntnisse, wie eingewiesene Schweißer, das System effizient nutzen können. Als „schlüsselfertiges System“ wurde hierbei auf eine leichte Integration in existierende Abläufe sowie lediglich geringe Anforderungen an die bestehende IT-Infrastruktur geachtet.
Eine neu entwickelte Software zur automatischen Roboterprogrammierung übernimmt, basierend auf Modellen der verwendeten Produkte, Prozesse und Ressourcen, alle Aufgaben der Planung und Generierung von Roboterprogrammen. Sie berücksichtigt in den erzeugten Roboterprogrammen automatisch Prozessanforderungen, wie die Einhaltung der korrekten Schweißwinkel und -geschwindigkeiten, sowie Vorgaben aus der anwendungsorientierten Programmierung. Benötigte Parameter werden, wenn möglich, direkt aus den Auftragsdaten und digitalen Werkstückbeschreibungen berechnet. Andernfalls legt der einrichtende Schweißer sie fest.
„Lernende“ Software für optimalen Schweißprozess
Im Projekt SMErobotics neu entwickelte Technologie- und Prozessmodelle, die das spezielle Fertigungswissen beim Bahnschweißen und verwandten Fertigungsprozessen abbilden, ermöglichen dem Robotersystem, die Bedeutung des Fertigungsprozesses zu „verstehen“. Ähnlich wie der menschliche Schweißexperte erfasst es auftretende Bauteil- und Umgebungsabweichungen und kann selbstständig entscheiden, wie darauf reagiert werden soll, um eine optimale Nahtqualität zu erreichen. Diese Abweichungen werden ebenso wie der aktuelle Nahtgrund und die Form des Schweißspalts mit optischen Sensoren erfasst und automatisch bewertet. Damit kann sich das System anders als fest programmierte Lösungen ohne Eingriff des Nutzers optimal an Bauteilabweichungen und einen sich ändernden Nahtgrund und Schweißspalt anpassen.
Die lernfähige Software nutzt bei der vollautomatischen Erzeugung der Roboterprogramme erlaubte Prozessabweichungen, wie bspw. die Neigung der Schweißpistole um eine gewisse Winkelspanne, um Kollisionen zu vermeiden oder die Prozessausführung zu optimieren. Eine 3D-Visualisierung auf einem Tablet-PC ermöglicht dem Schweißexperten, den gesamten Schweißprozess zu simulieren und falls notwendig zu korrigieren.
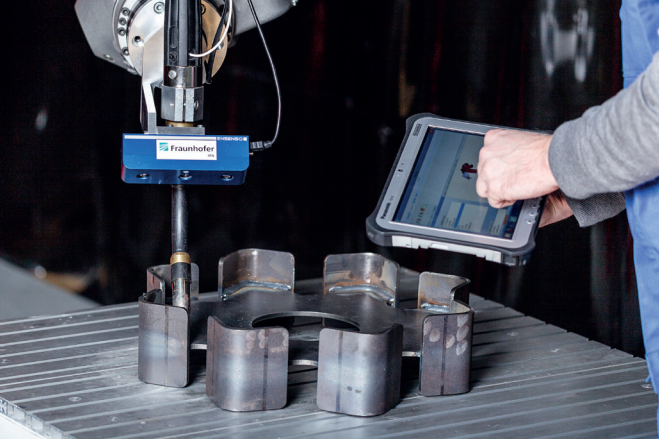
Über die neuartige, intuitive Benutzeroberfläche kann der Bediener eine vorgeschlagene Schweißnahtreihenfolge oder andere automatisch gewählte Parameter bewerten und verändern (Bild 2).
Damit kann der Prozessexperte seinen Erfahrungsschatz und sein Expertenwissen einbringen und das Robotersystem einfach „belehren“. Durch direkte Mensch-Roboter-Kollaboration beim Handführen kann der Bediener den Roboterendeffektor „an die Hand nehmen“, um intuitiv Schweißpositionen anzupassen oder dem Roboter zusätzliche Messpositionen zu zeigen.
Die Software verbindet die manuellen Änderungen mit Werkstück- und Umgebungsdaten und lernt so verbesserte Regeln zur Programmerzeugung.
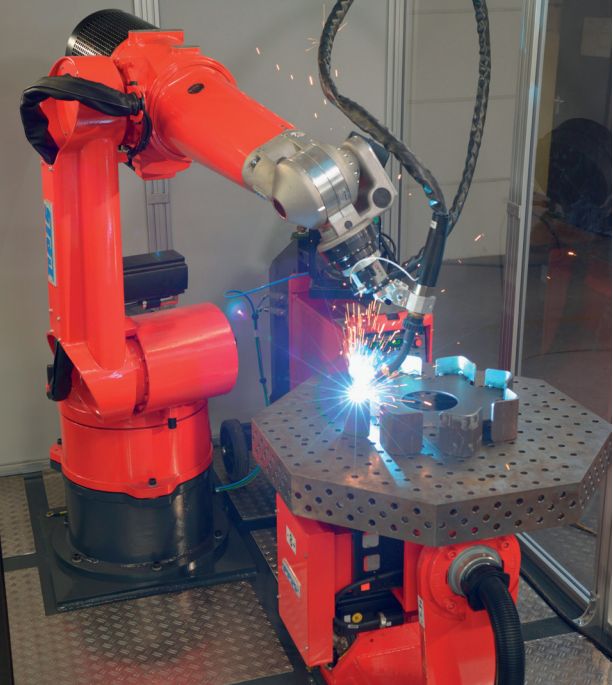
Die Qualität der automatisch geschweißten Nähte kann anschließend sowohl sensorgestützt als auch vom Schweißer bewertet und vom System selbst mit Erwartungen aus den Prozessmodellen verglichen werden (Bild 3). Verfahren zur Prozessoptimierung nutzen die Ergebnisse dieser automatischen Auswertung, zusammen mit den verwendeten Prozessparametern und vorher erkannten Werkstückeigenschaften, zur kontinuierlichen Verbesserung der Prozessmodelle.
Das System lernt somit analog zum menschlichen Werker aus Erfahrungen und nutzt die gelernten Prozessparameter, um die Qualität bei wiederkehrenden Aufgaben zu verbessern und um Einrichtzeiten für nachfolgende Aufträge zu verkürzen. Die gewonnenen Daten können, sofern von der vorhandenen IT-Infrastruktur unterstützt, dem bearbeiteten Werkstück dauerhaft zugewiesen und im Sinne einer vernetzten Produktion in nachfolgenden Produktionsschritten genutzt werden.
Montage von Produktvarianten einfach automatisieren
Die Montage von Produkten und Bauteilen stellt neben dem Schweißen einen weiteren wichtigen Fertigungsprozess dar. Auch dieser wird aufgrund vielfältiger Herausforderungen wie kleiner Losgrößen und vieler Produktvarianten („mass customization“) noch oft manuell ausgeführt. So sind gemäß World Robotics [4] nur elf Prozent der 2014 verkauften Robotersysteme in der Montage eingesetzt. Die Produkte werden häufig aus einem limitierten „Baukasten“ von Basiskomponenten zusammengesetzt, wie z. B. Ventilbaugruppen mit verschiedenen Bestückungsvarianten. Bisher können automatisierte Montagelösungen für solche Varianten nur mit hohem technischem Aufwand und mithilfe von Experten realisiert werden. Ebenso ist eine Anpassung an neue Varianten und individuelle Kundenwünsche nur bedingt möglich.
Durch konsequente Nutzung von CAD-Daten und automatisierten Planungssystemen können auch kleine Stückzahlen und individuelle Produkte für Einzelkunden wirtschaftlich automatisiert werden.
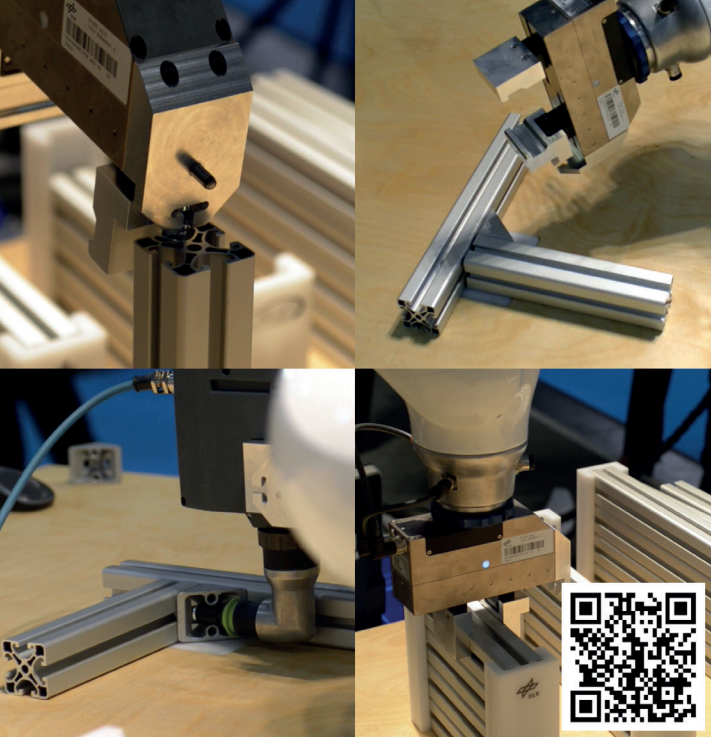
Hierfür entwickelt das Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) zusammen mit der TU Chemnitz, Lehrstuhl für Robotik und Mensch-Technik-Interaktion, und dem Roboterhersteller KUKA neuartige Konzepte und Methoden. Diese erlauben die robotergestützte, einfache und flexible Montage individueller Baugruppen, sodass eine variable und rekonfigurierbare (Teil-)Automatisierung in Zukunft mit minimalem Programmier- und Integrationsaufwand möglich wird. Diese Technologie adressiert insbesondere Systemintegratoren, die damit hoch flexible Fertigungsplätze (Bild 4) für den industriellen Endanwender bereitstellen können.

Das Konzept basiert auf der Integration und Vernetzung von modernen Planungsalgorithmen für robotische Systeme mit Wissensdatenbanken und Anwendertools. Eine durchgängige Weitergabe von Produktdaten aus den CAD-Systemen von der Kundenbestellung bis hin zum Roboterprogramm ermöglicht, den Anforderungen der flexiblen Produktion der Zukunft im Kontext der Industrie 4.0 gerecht zu werden. Ein automatischer Montageplaner errechnet die Montageschritte direkt aus den CAD-Daten und setzt sie in ein Roboterprogramm um. Dabei werden in Abhängigkeit des Roboteraufbaus und der Anordnung von Fixiereinrichtungen für jede gültige Kombination von Bauteilen die notwendigen Roboteraktionen berechnet.
Mithilfe einer Vorab-Simulation kann der geschulte Werker die Montage verschiedener Produkte testen und den Aufbau der Arbeitszelle selbst optimieren, z. B. durch Verändern der Roboter- oder Ablagepositionen.
Automatische Planung robuster Roboteraktionen
Intern greift das System auf eine Wissensdatenbank mit geometrischen Informationen der Bauteile und Eigenschaften der Roboter zurück. Diese werden von den nachgelagerten Planungsalgorithmen verwendet, um die Aktionen des Robotersystems selbstständig auszugestalten und an die individuelle Baugruppe anzupassen. Dazu nutzt das System in der Wissensdatenbank vorkonfigurierte Roboteraktionen, die sich einfach an den aktuellen Montageschritt anpassen lassen. Diese Roboteraktionen sind in ihrer Art weitgehend allgemein implementiert, sodass sie für ein möglichst breites Anwendungsspektrum wiederverwendbar sind und damit den Aufwand für eine neue Produktserie deutlich minimieren. Eine symbolische Parametrisierung der Aktionen ermöglicht dabei eine logische Verallgemeinerung in unterschiedlichen Montagekontexten [5].
Ein besonderer Fokus im System liegt auf einer möglichst robusten Implementierung der Roboteraktionen, um Unsicherheiten in der Arbeitszelle ohne aufwendige Kalibrierungsschritte kompensieren zu können. Die Ausnutzung der sensitiven Regelungsmöglichkeiten des Leichtbauroboters KUKA LBR iiwa ermöglicht es, Kontakte des Roboterarms mit der Umgebung zu erkennen und gezielt darauf zu reagieren. Das wird bspw. genutzt, um Werkstücke und Fixiervorrichtungen in der Arbeitszelle exakt zu lokalisieren, wo nur eine grobe Positionsangabe vorhanden ist. Dies ist besonders bei kleinen Losgrößen von Bedeutung.
An einem Technologiedemonstrator auf der AUTOMATICA 2014 konnten Besucher das System bereits testen, indem sie beliebige Formen aus Profilen und Verbindern aus einem Systembaukasten für den Betriebsmittelbau auslegen konnten, die anschließend von einem KUKA LBR iiwa montiert und verschraubt wurden (Bild 5). Hierfür wurde das ausgelegte Konstrukt per Kamera erfasst und anhand einer Bauteildatenbank in ein CAD-Modell überführt. Aus den CAD-Daten wurde dann automatisch ein Montageplan berechnet und ein Roboterprogramm generiert [6].
Für eine agile Produktion bedarf es, auch über Schweißanwendungen oder Einzelteilmontage hinaus, weiterer Techniken wie z. B. robuster Umgebungswahrnehmung, Situationserfassung („Situation Awareness“ [7, 8]) und Mensch-Maschine-Schnittstellen [9], durch die Maschinen leistungsfähiger, aber gleichzeitig einfacher beherrschbar werden. Diese und weitere Technologien werden ebenfalls im SMErobotics-Projekt entwickelt und in acht industriellen Szenarien, darunter die Stahlverarbeitung großer Bauteile und die Fertigung von Wandmodulen für Holzhäuser, in der Praxis erprobt. Mehrere dieser Szenarien und Lösungen werden auf der kommenden AUTOMATICA im Juni 2016 präsentiert.
Beide vorgestellten Beispiele demonstrieren auf unterschiedliche und trotzdem verwandte Weise die Potenziale intelligenter und flexibler Automatisierung. Indem mühsame und kostspielige Programmierung durch automatische Planung und ein Nebeneinander von Mensch und Maschine durch ein Miteinander ersetzt werden, ergänzen sich die jeweiligen Stärken. Durch die Vernetzung über das Internet ist es künftig möglich, ein Robotersystem schnell um neue Fähigkeiten und Roboteraktionen zu erweitern, sodass Umrüstungen effizient durchführbar sind.
So können Unternehmen zügig auf sich ändernde Marktbedingungen reagieren und Kundenwünsche schnell und wirtschaftlich bedienen.
Dieser Beitrag entstand im Kontext des SMErobotics Projekts, das im 7. Rahmenprogramm der Europäischen Union unter Vertrag #287787 vom 01.01.2012-30.06.2016 gefördert wird.
Literatur
[1] SMErobotics Konsortium: Smerobotics, Abrufdatum 20.01.2016.[2] http://www.smerobotics.org/demonstrations.html, Abrufdatum 27.01.2016.
[3] http://www.ipa.fraunhofer.de/schweissroboterassistent.html, Abrufdatum 27.01.2016.
[4] Litzenberger, G. (Hrsg): World Robotics 2015 Industrial Robots. International Federation of Robotics / Statistical Department 2015.
[5] Andersen, R. H.; Sølund, T.; Hallam, J.: Definition and Initial Case-Based Evaluation of Hardware-Independent Robot Skills for Industrial Robotic Co-Workers. ISR/Robotik 2014 41st International Symposium on Robotics; 6th German Conference on Robotics. URL: https://www.vde-verlag.de/proceedings-en/453601015.html.
[6] Easy Automation of Assembly Tasks, Abrufdatum 27.01.2016.
[7] Beck, A. B.; Schwartz, A. D.; Fugl, A. R.; Naumann, M.; Kahl, B.: Skill-based Exception Handling and Error Recovery for Collaborative Industrial Robots. In: FinE-R 2015: Path to Success: Failures in rEal Robots, Proceedings of the workshop the Path to Success: Failures in rEal Robots. URL: http://ceur-ws.org/Vol-1484.
[8] Somani, N.; Dean-Leon, E.; Cai, C.; Knoll, A.: Perception and Reasoning for Scene Understanding in Human-Robot Interaction Scenarios, REACTS workshop at CAIP. URL: http://www.reacts2013.uma.es.
[9] Somani, N.; Dean-Leon, E.; Cai, C.; Knoll, A.: A framework for symbiotic Human Robot Collaboration in the industrial domain, 6th Workshop on Human-Friendly Robotics DIAG, Sapienza Università di Roma. URL: http://hfr13.files.wordpress.com/2013/08/29ssomani.pdf.






